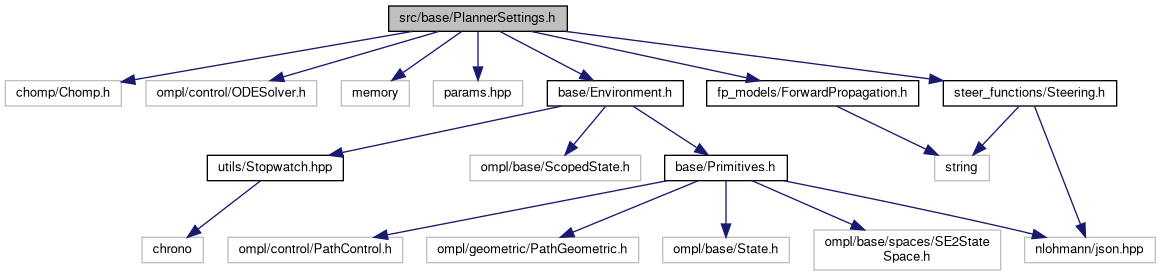
#include <chomp/Chomp.h>#include <ompl/control/ODESolver.h>#include <memory>#include <params.hpp>#include "base/Environment.h"#include "fp_models/ForwardPropagation.h"#include "steer_functions/Steering.h"
Include dependency graph for PlannerSettings.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | sbpl |
| namespace | robot |
| namespace | distance_computation |
| namespace | PlannerSettings |
| Settings required to set up planner(s) and planning problem. | |
Enumerations | |
| enum | sbpl::Planner { sbpl::SBPL_ARASTAR , sbpl::SBPL_ADSTAR , sbpl::SBPL_RSTAR , sbpl::SBPL_ANASTAR , sbpl::SBPL_MHA , sbpl::SBPL_LAZY_ARA } |
| enum | robot::Model { robot::ROBOT_POINT , robot::ROBOT_POLYGON } |
| enum | distance_computation::Method { distance_computation::BRUTE_FORCE , distance_computation::DEAD_RECKONING } |
Functions | |
| std::string | distance_computation::to_string (Method m) |