Sampling
The planners can be configured to use random (default) or deterministic (Halton) sampling.
The sampling is defined by the ompl.sampler setting:
| Value | Description |
|---|---|
iid | Random (i.i.d.) sampling |
halton | Halton sampling (deterministic) |
Example
mpb = MPB()
mpb.set_planners(['prm'])
mpb.set_steer_functions(['reeds_shepp'])
mpb.set_corridor_grid_env(radius=3)
mpb["ompl.seed"] = 0
# Random sampling
mpb_iid = deepcopy(mpb)
mpb_iid.set_id('iid')
mpb_iid["ompl.sampler"] = "iid"
# Deterministic sampling
mpb_halton = deepcopy(mpb)
mpb_halton.set_id('halton')
mpb_halton["ompl.sampler"] = "halton"
pool = MultipleMPB()
pool.benchmarks.append(mpb_iid)
pool.benchmarks.append(mpb_halton)
pool.run_parallel(runs=10, id='samplers', show_plot=False)
pool.merge('samplers/samplers.json', plan_names=['PRM (iid)', 'PRM (Halton)'])
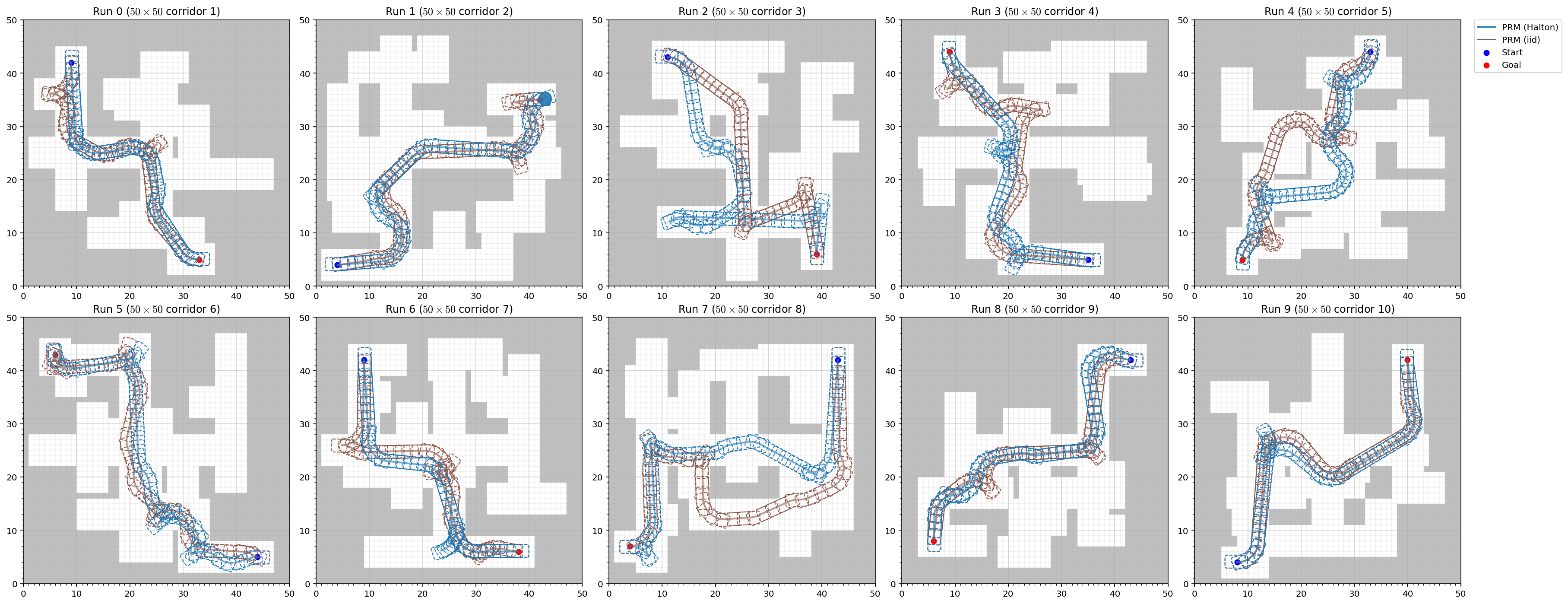
from trajectory import visualize
visualize('samplers/samplers.json')
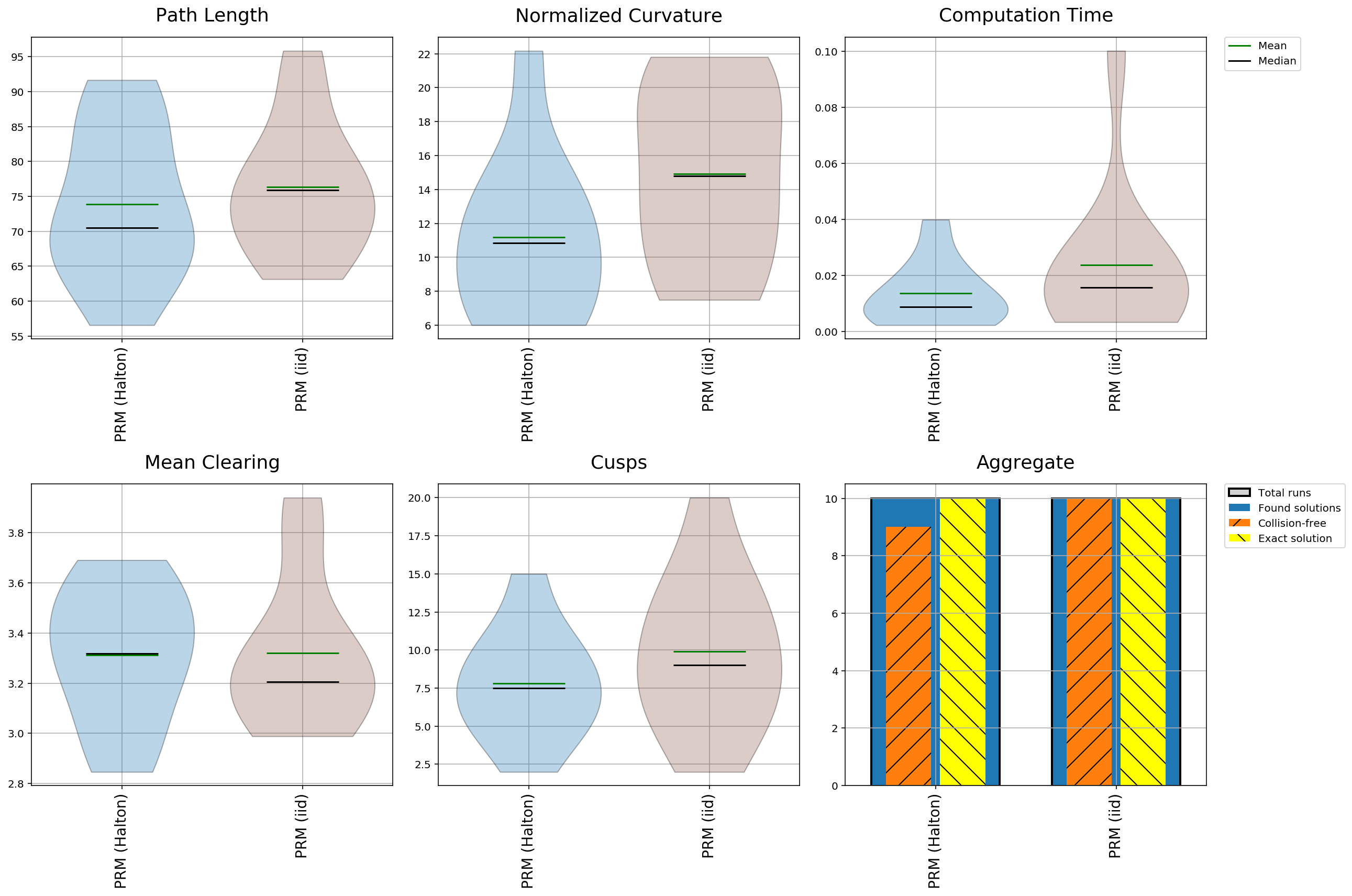
from plot_stats import plot_planner_stats
plot_planner_stats('samplers/samplers.json')