Extend Functions
Bench-MR has support for various steer functions used by sampling-based planners, and kinodynamic robot models for forward-propagating planners.
Steer Functions
The steer functions can be provided by a list of function names (see below).
MPB.set_steer_functions(steerings: [str])
This function will set the configuration benchmark.steer_functions to the provided list of steer functions, and set the parameter benchmark.control_planners_on to False.
The following steer functions are provided with Bench-MR at the moment:
| Steer function name | Description |
|---|---|
reeds_shepp | Reeds-Shepp (from OMPL) |
dubins | Dubins (from OMPL) |
posq | POSQ (from palmieri/posq) |
linear | Linear (straight-line) steering |
cc_dubins | Continuous-curvature Dubins (from hbanzhaf/steering_functions) |
hc_reeds_shepp | Hybrid-curvature Reeds-Shepp (from hbanzhaf/steering_functions) |
cc_reeds_shepp | Continuous-curvature Reeds-Shepp (from hbanzhaf/steering_functions) |
Robot Models
The robot models can be provided by a list of names (see below).
MPB.set_robot_models_functions(robot_models: [str])
This function will set the configuration benchmark.forward_propagations to the provided list of robot models, and set the parameter benchmark.control_planners_on to True.
The following robot models are provided with Bench-MR at the moment:
| Robot model name | Description |
|---|---|
kinematic_car | Kinematic Car |
kinematic_single_track | Kinematic Single Track |
Depending on the benchmark.control_planners_on setting, each MPB instance runs all the specified steer functions or robot model functions in sequence.
Example
def create_mpb(planner : str, extend_function : str, planning_time):
mpb = MPB()
mpb["max_planning_time"] = planning_time
mpb.set_planners([planner])
if(extend_function in steer_functions):
mpb.set_steer_functions([extend_function])
if(extend_function in robot_models):
mpb.set_robot_models_functions([extend_function])
mpb.set_corridor_grid_env(radius=5, branches = 15)
mpb["ompl.seed"] = 0
mpb.set_id('comparison_extend_function_%s_%s' % (planner, extend_function))
return mpb
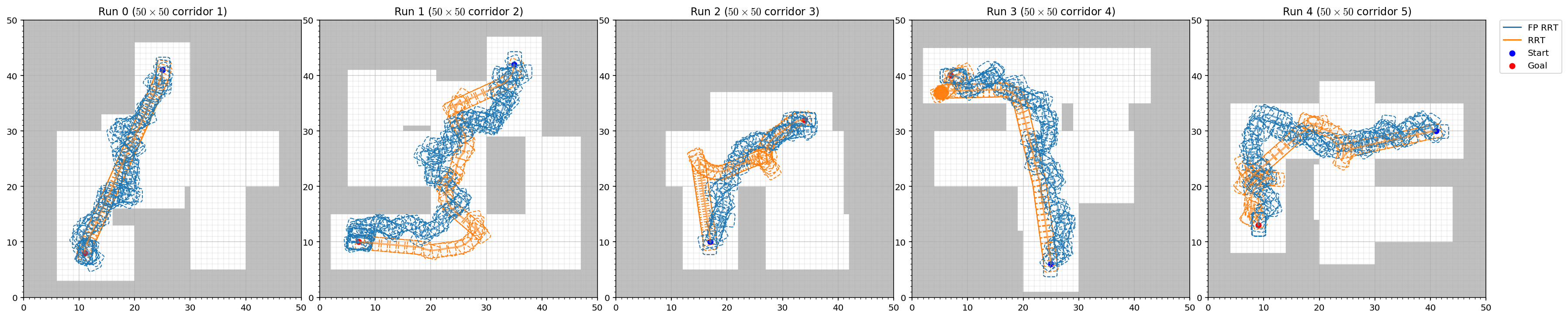
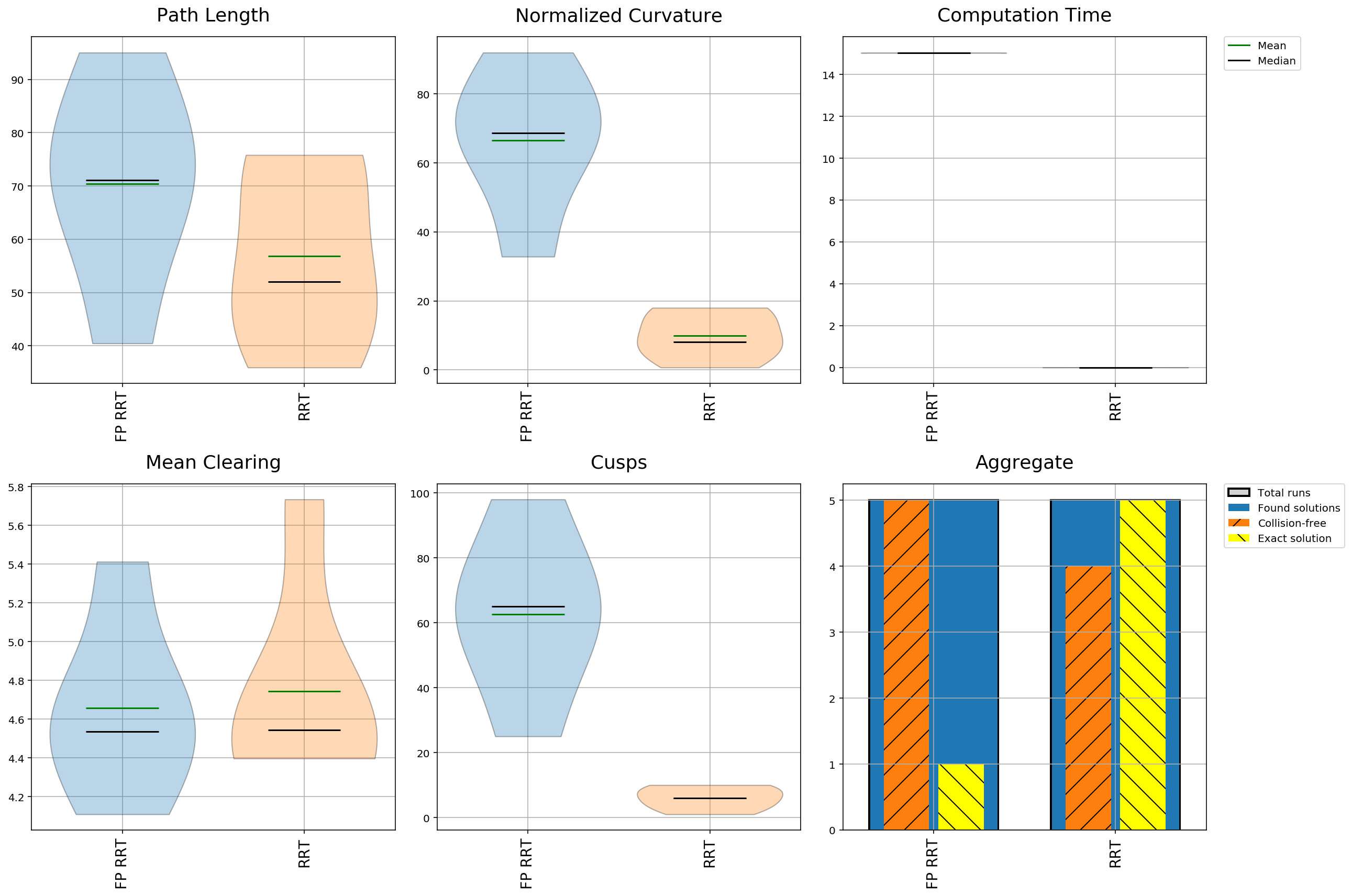
Comparing RRT with different extend function
In the following we compare the classical RRT algorithm, with 2 different extend function, namely the Reeds-Shepp steer function and the kinematic car model (used in forward propagation).
pool = MultipleMPB()
pool.benchmarks.append(create_mpb('rrt', 'reeds_shepp', 15))
pool.benchmarks.append(create_mpb('fprrt', 'kinematic_car', 15))
pool.run_parallel(runs=5, id='comparison_extend_functions', show_plot=True)
pool.merge('comparison_extend_functions.json')
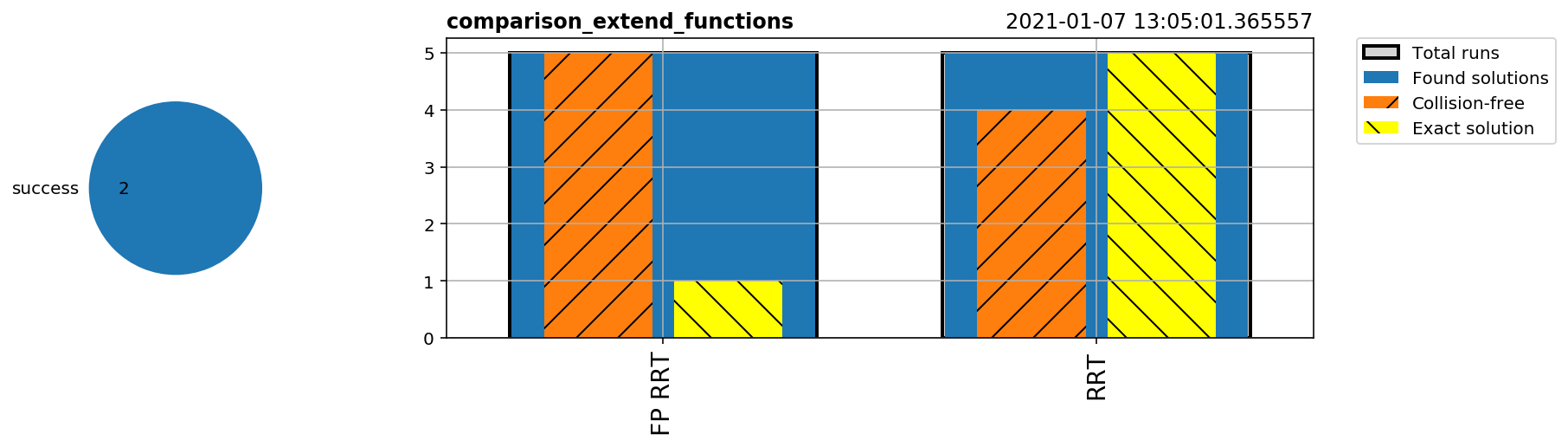
visualize('comparison_extend_functions.json', num_colors=10)
plot_planner_stats('comparison_extend_functions.json', num_colors=10)
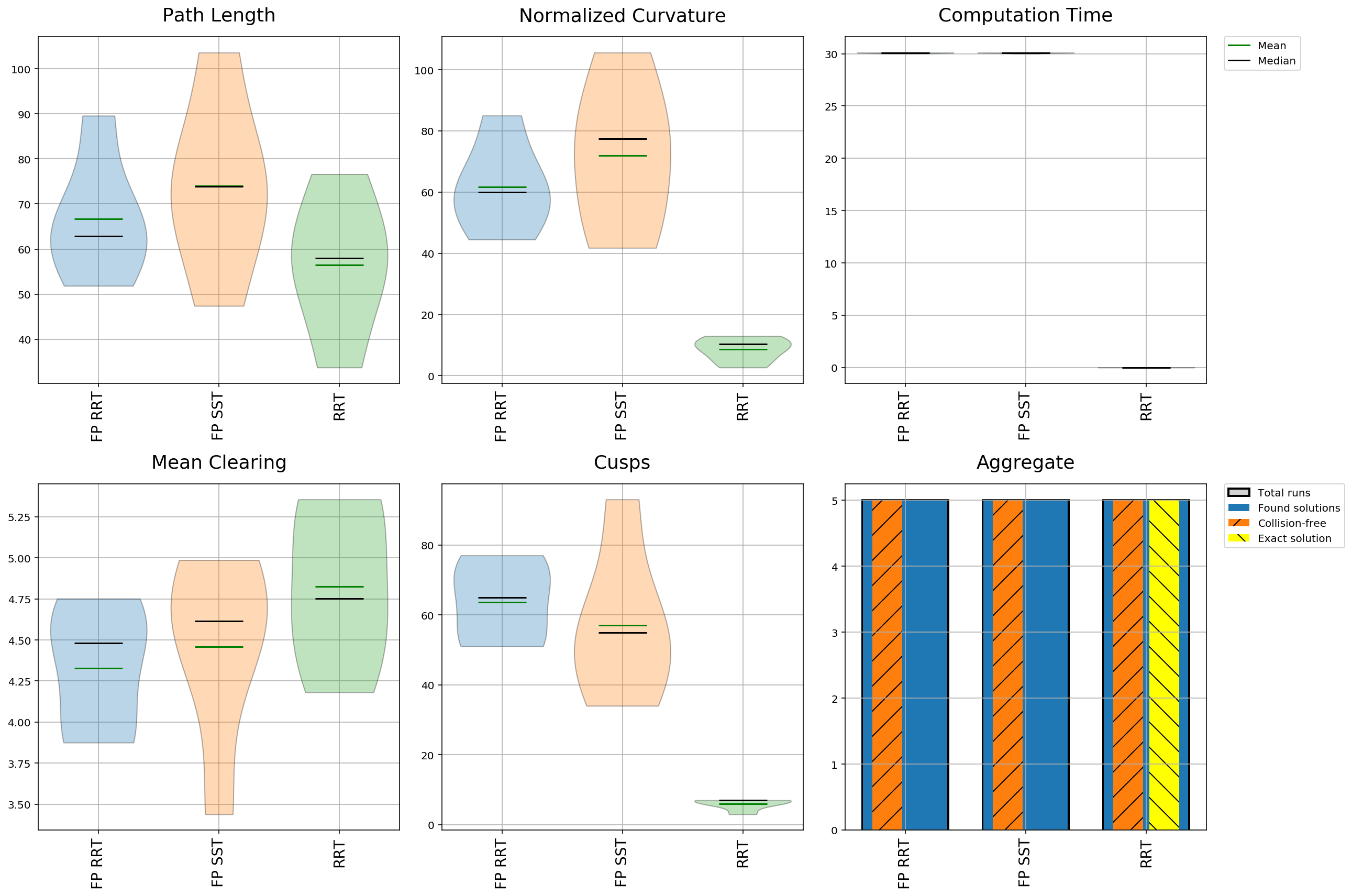
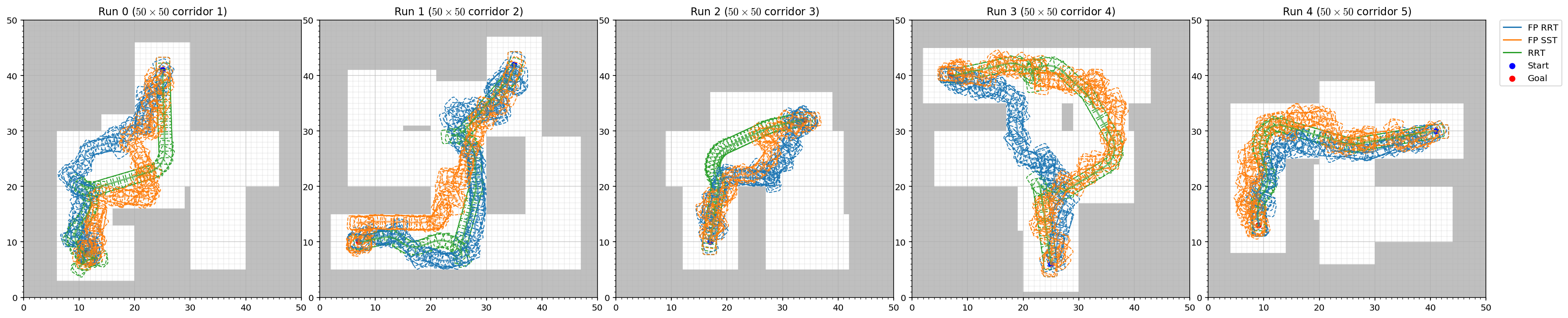
We add now in the comparison also SST, an asymptotically near-optimal incremental version of RRT.
pool = MultipleMPB()
pool.benchmarks.append(create_mpb('rrt', 'reeds_shepp', 30))
pool.benchmarks.append(create_mpb('fprrt', 'kinematic_car', 30))
pool.benchmarks.append(create_mpb('fpsst', 'kinematic_car', 30))
pool.run_parallel(runs=5, id='comparison_extend_functions_with_sst', show_plot=True)
pool.merge('comparison_extend_functions_with_sst.json')
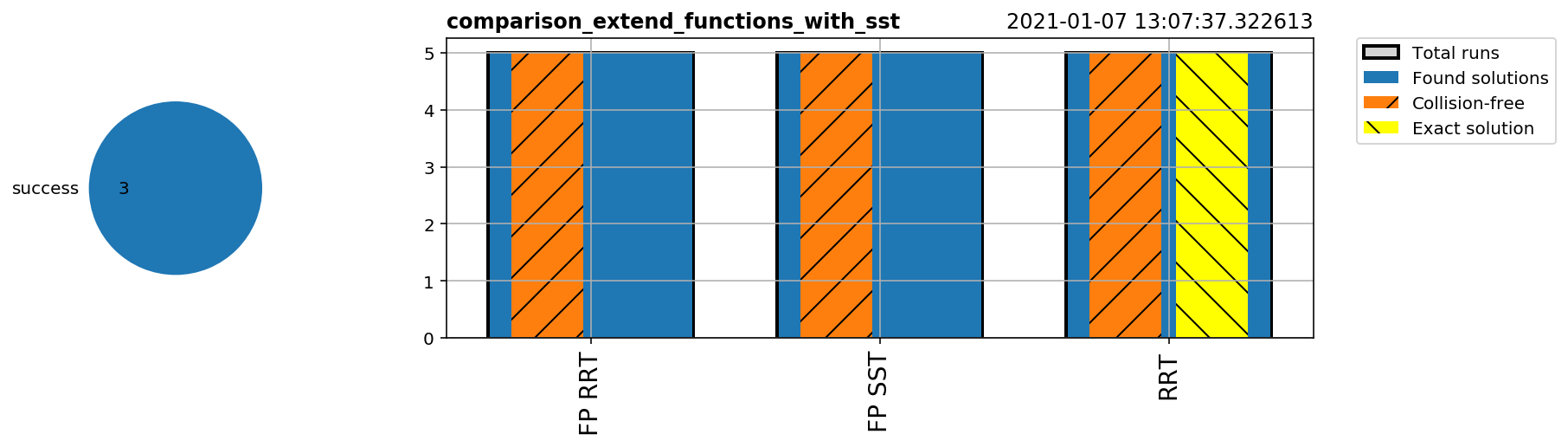
visualize('comparison_extend_functions_with_sst.json', num_colors=10)
plot_planner_stats('comparison_extend_functions_with_sst.json', num_colors=10)