Bench-MR:
A Motion Planning Benchmark for Wheeled Mobile Robots
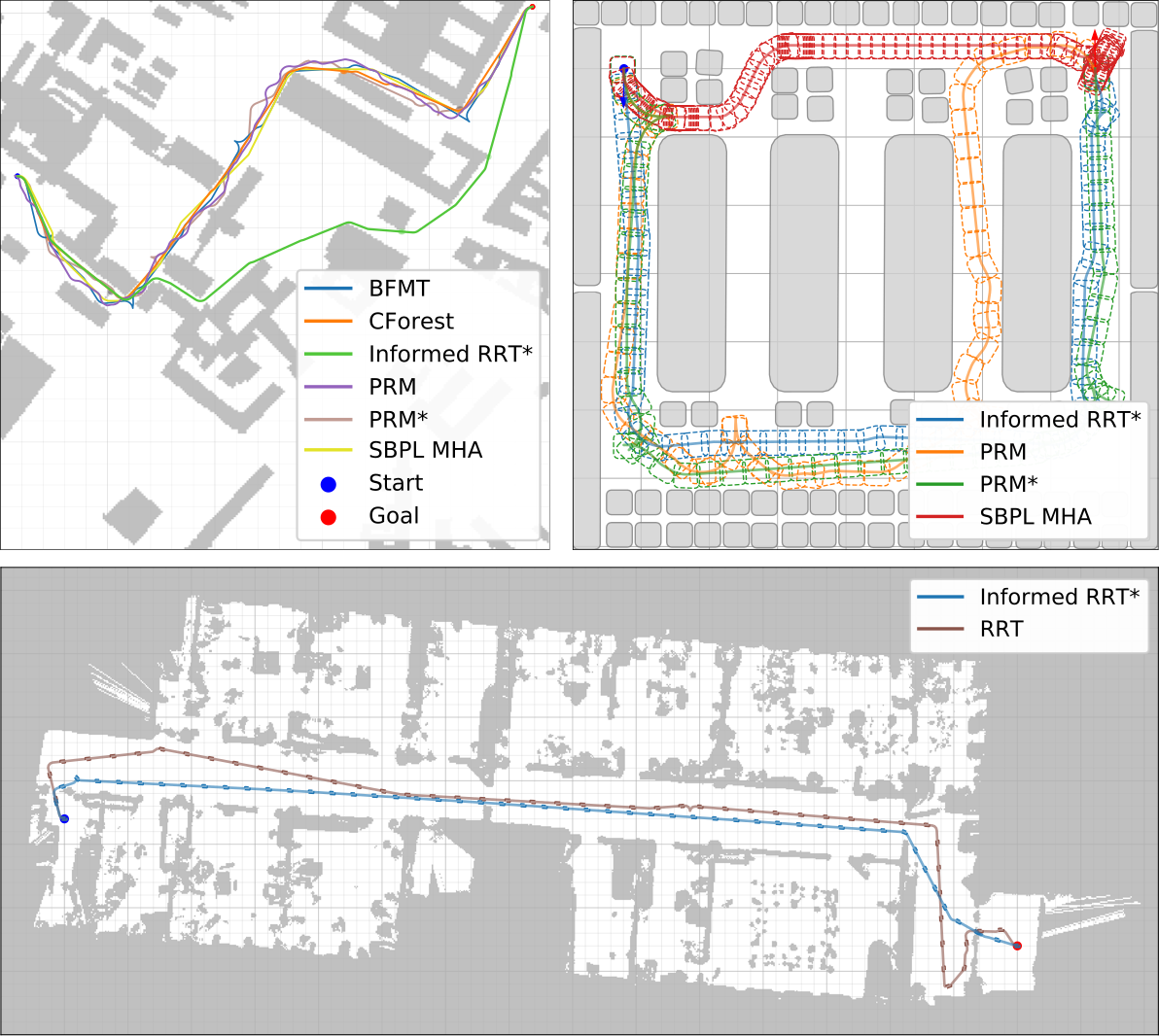
Bench-MR is a software suite of components that allow for the benchmarking of motion planning algorithms on various types of scenarios. The planners can use a large variety of extend functions, post-smoothing methods, and optimization objectives. Through our front-end based on Jupyter notebooks, Bench-MR provides tools for plotting and evaluation to gain insights into many aspects of the planning pipeline.
This website provides the documentation to Bench-MR, and hosts several up-to-date results charts that are updated automatically from the current version of the code base on GitHub.