Post Smoothers
Given a solution from a motion planner, post smoothing, or path improvement algorithms attempt to find a better (e.g., shorter, smoother) path.
A list of smoothers can be provided to the MPB instance which will run a benchmark replicating all the settings across each selected smoother. The user-friendly function is the following that will enable the respective smoothers in under the benchmark.planning group:
MPB.set_smoothers(smoothers: [str])
The smoother names are parsed from the list of strings, showing an error if any entry could not be unified with the available smoothers in Bench-MR. Check the smoother_names dictionary in definitions.py for the mapping of smoother names to be given to the set_smoothers function, and their respective printable titles:
| Smoother Name | Smoother Title |
|---|---|
grips | GRIPS |
ompl_bspline | B-Spline |
ompl_shortcut | Shortcut |
ompl_simplify_max | SimplifyMax |
Example
mpb = MPB()
mpb.set_corridor_grid_env(radius = 3)
mpb.set_planners(['rrt'])
mpb.set_steer_functions(['reeds_shepp'])
mpb.set_smoothers(['grips',
'ompl_bspline',
'ompl_shortcut',
'ompl_simplify_max'])
mpb.run(runs=5);
Visualize trajectories (original solution and smoothed paths):
mpb.visualize_trajectories(show_smoother=True);

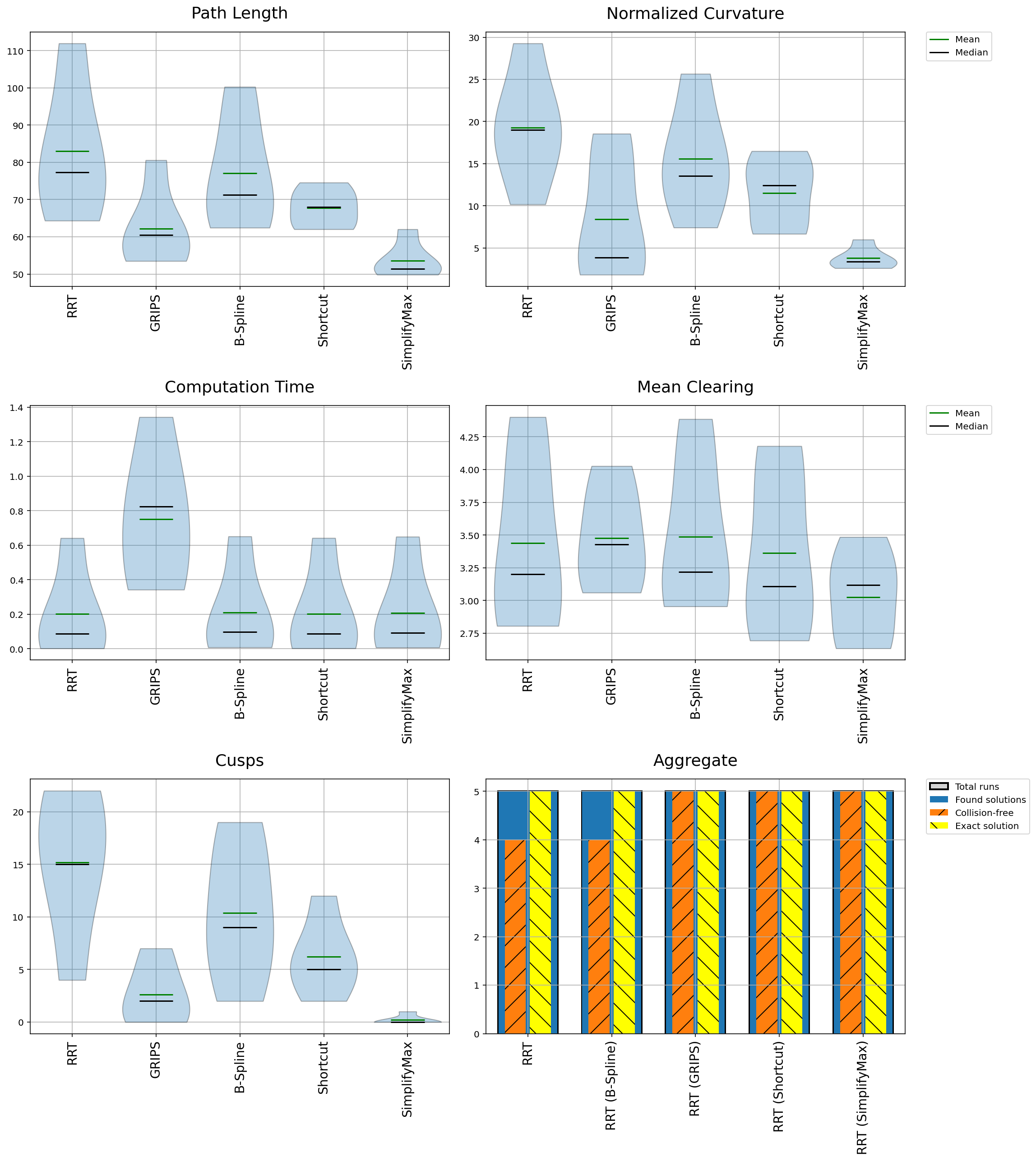
Plot statistics for the 5 runs comparing the original plan against the post-smoothing solutions:
mpb.plot_smoother_stats();