Collision Checking
Bench-MR supports collision detection for a robot represented by a point or a convex polygon.
The env.collision.collision_model defines the collision model:
| Value | Description |
|---|---|
0 | Point-based collision model |
1 | Polygon-based collision model |
For polygon-based collision detection, the SVG file representing the robot shape can be optionally set via the env.collision.robot_shape_source setting (see below).
Example
Set up warehouse2 scenario with RRT as the planner.
m = MPB()
m.set_planners(['rrt'])
m["max_planning_time"] = 60
m["env.start"] = {"theta": -1.58, "x": 7.5, "y": -10}
m["env.goal"] = {"theta": -1.58, "x": 116, "y": -70}
m["env.type"] = "polygon"
m["env.polygon.source"] = "polygon_mazes/warehouse2.svg"
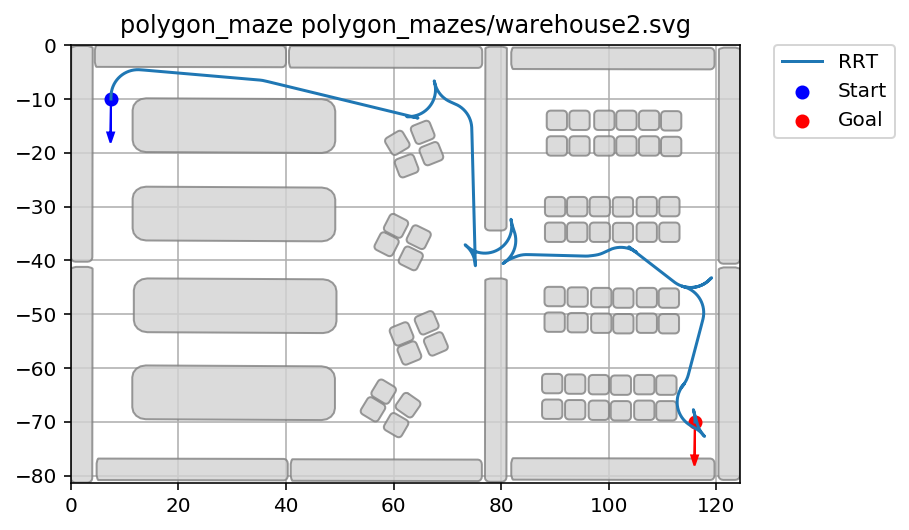
Point-based collision model
m["env.collision.collision_model"] = 0
m.run(runs=1)
m.visualize_trajectories(draw_start_goal_thetas=True, plot_every_nth_polygon=10, silence=True)
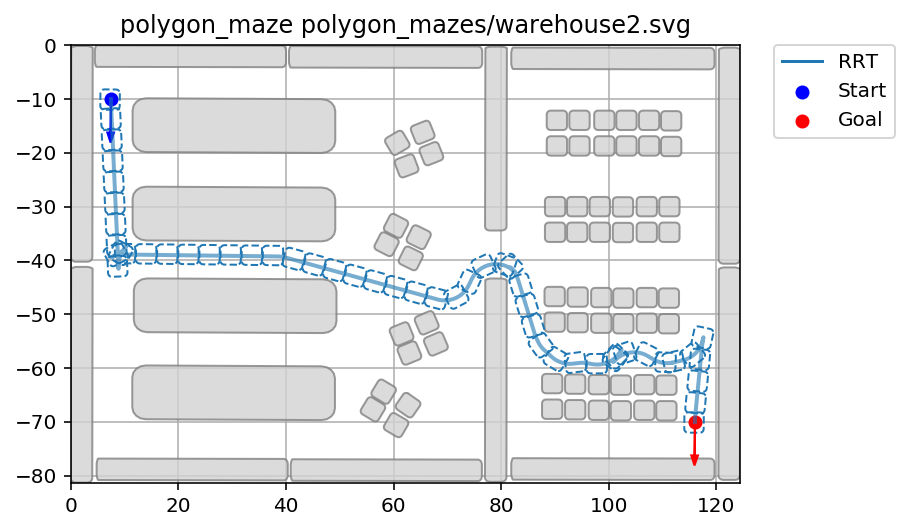
Polygon-based collision model
We use the env.collision.robot_shape_source setting to define a collision shape for the robot to load from a SVG file.
m["env.collision.collision_model"] = 1
m["env.collision.robot_shape_source"] = "polygon_mazes/warehouse_robot.svg"
m.run(runs=1)
m.visualize_trajectories(draw_start_goal_thetas=True, plot_every_nth_polygon=10, silence=True)