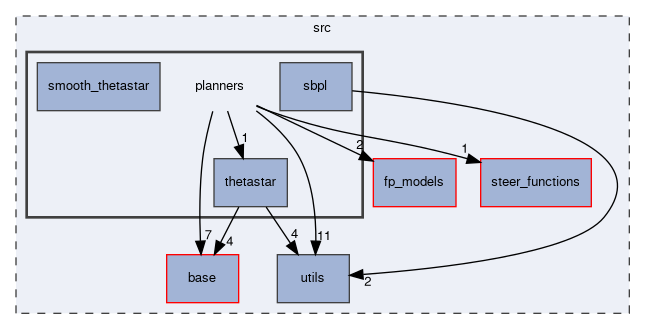
Directory dependency graph for planners:
Directories | |
| directory | sbpl |
| directory | smooth_thetastar |
| directory | thetastar |
Files | |
| file | AbstractPlanner.cpp |
| file | AbstractPlanner.h [code] |
| file | AStar.hpp [code] |
| file | OMPLAnytimePathShortening.hpp [code] |
| file | OMPLControlPlanner.hpp [code] |
| file | OMPLPlanner.hpp [code] |
| file | OMPLSimplifier.hpp [code] |