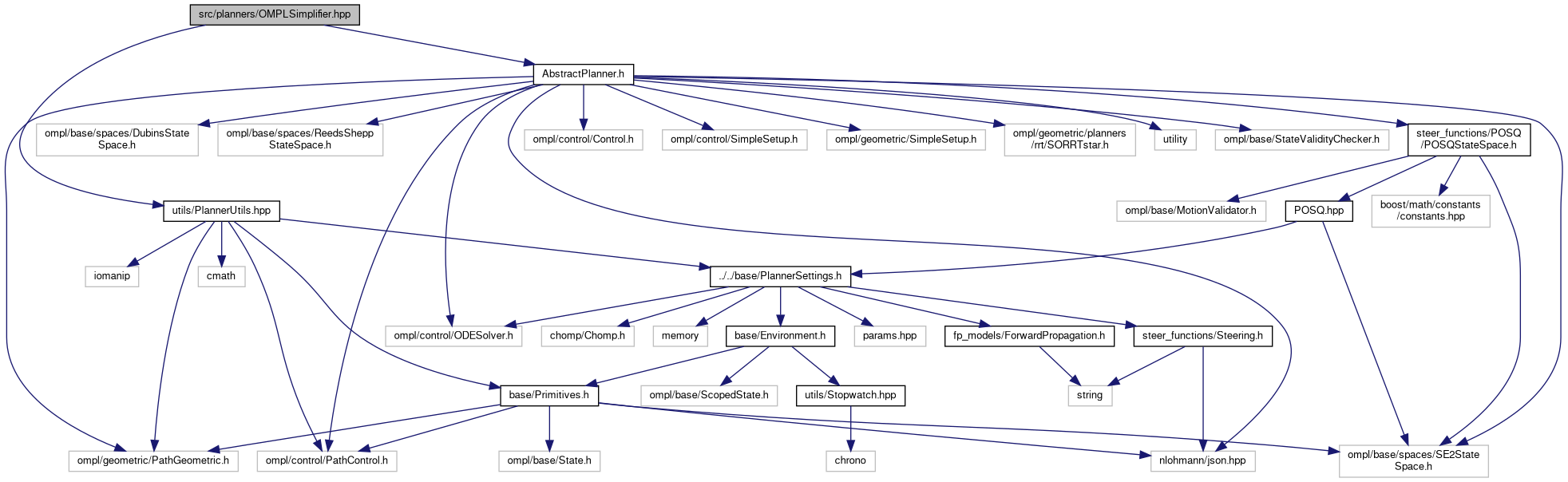
Include dependency graph for OMPLSimplifier.hpp:
Go to the source code of this file.
Classes | |
| class | OMPLSimplifier |
| Derived from AbstractPlanner, this class is intended to simplify existing (hand-crafted) trajectories using OMPL path simplifiers. More... | |