Bench-MR
A Motion Planning Benchmark for Wheeled Mobile Robots
src
planners
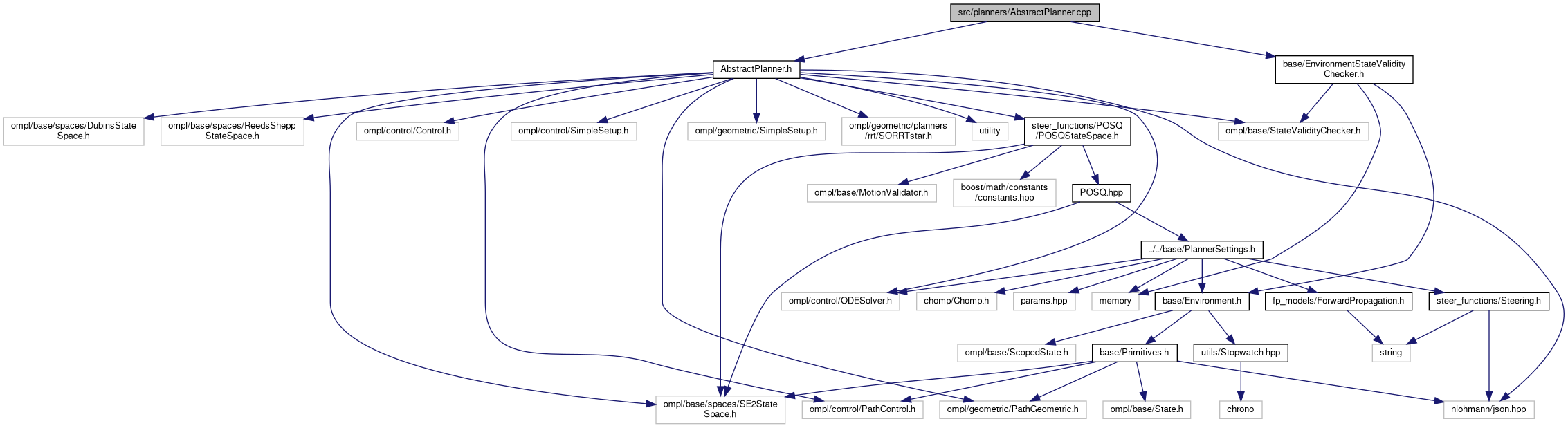
AbstractPlanner.cpp File Reference
#include "
AbstractPlanner.h
"
#include "
base/EnvironmentStateValidityChecker.h
"
Include dependency graph for AbstractPlanner.cpp:
Generated by
1.9.4