#include <ompl/base/spaces/SE2StateSpace.h>#include <ompl/control/ODESolver.h>#include <ompl/control/SpaceInformation.h>#include <ompl/control/spaces/RealVectorControlSpace.h>
Include dependency graph for kinematic_car.hpp:

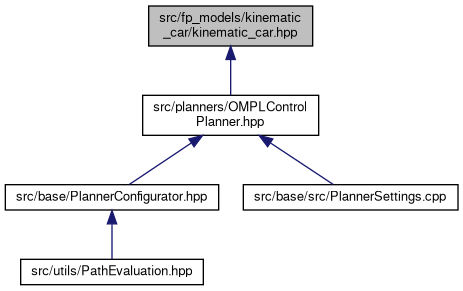
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | KinematicCar |
Functions | |
| void | KinematicCar::kinematicCarODE (const oc::ODESolver::StateType &q, const oc::Control *control, oc::ODESolver::StateType &qdot) |
| void | KinematicCar::kinematicCarPostIntegration (const ob::State *, const oc::Control *, const double, ob::State *result) |
| void | KinematicCar::propagate (const oc::SpaceInformation *si, const ob::State *state, const oc::Control *control, const double duration, ob::State *result) |