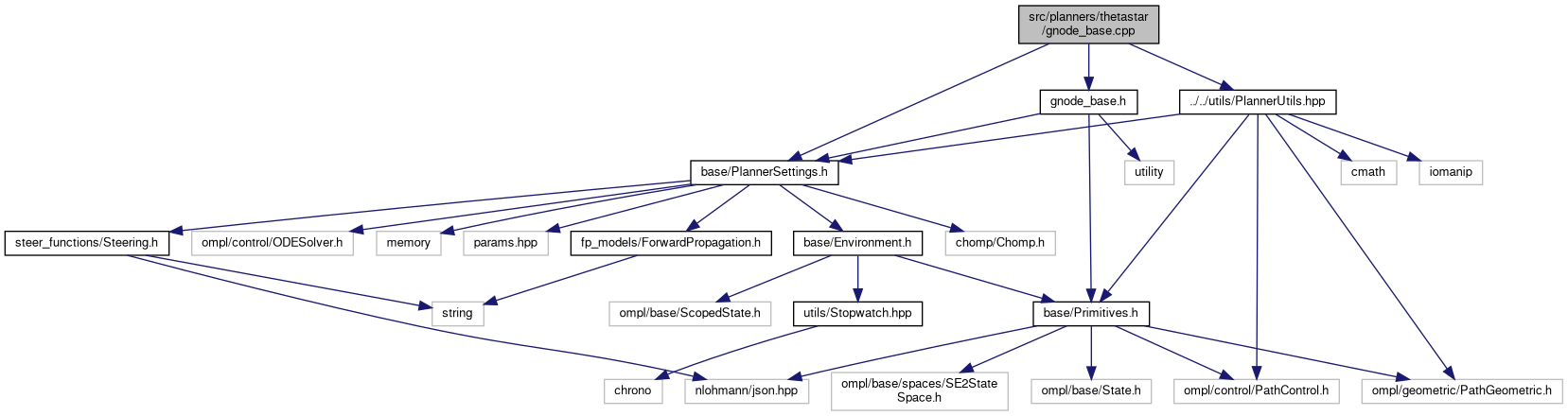
#include "gnode_base.h"#include "../../base/PlannerSettings.h"#include "../../utils/PlannerUtils.hpp"
Include dependency graph for gnode_base.cpp:
Functions | |
| bool | line (double x0, double y0, double y1, double x1) |
Function Documentation
◆ line()
| bool line | ( | double | x0, |
| double | y0, | ||
| double | y1, | ||
| double | x1 | ||
| ) |