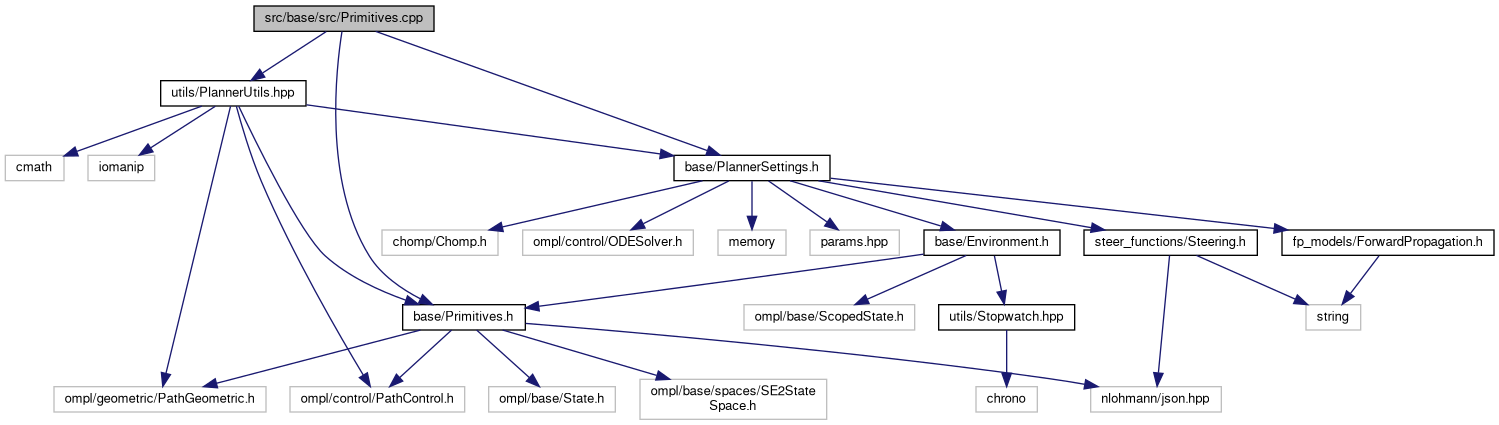
Include dependency graph for Primitives.cpp:
Functions | |
| int | orientation (const Point &p, const Point &q, const Point &r) |
|
Bench-MR
A Motion Planning Benchmark for Wheeled Mobile Robots
|
Functions | |
| int | orientation (const Point &p, const Point &q, const Point &r) |