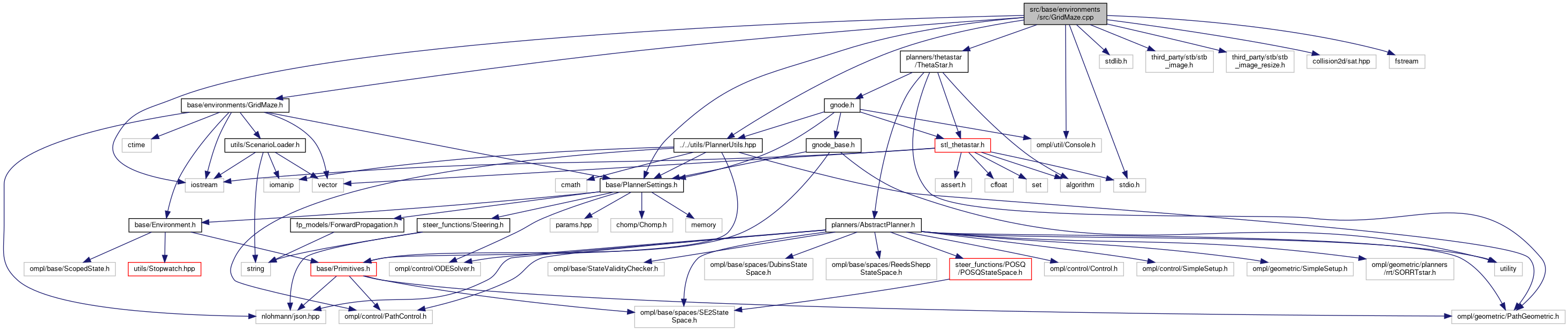
#include "base/environments/GridMaze.h"#include <ompl/util/Console.h>#include <planners/thetastar/ThetaStar.h>#include <stdio.h>#include <stdlib.h>#include <third_party/stb/stb_image.h>#include <third_party/stb/stb_image_resize.h>#include <collision2d/sat.hpp>#include <fstream>#include <iostream>#include "base/PlannerSettings.h"#include "utils/PlannerUtils.hpp"
Include dependency graph for GridMaze.cpp:
Macros | |
| #define | STB_IMAGE_IMPLEMENTATION |
| #define | STB_IMAGE_RESIZE_IMPLEMENTATION |
Macro Definition Documentation
◆ STB_IMAGE_IMPLEMENTATION
| #define STB_IMAGE_IMPLEMENTATION |
◆ STB_IMAGE_RESIZE_IMPLEMENTATION
| #define STB_IMAGE_RESIZE_IMPLEMENTATION |