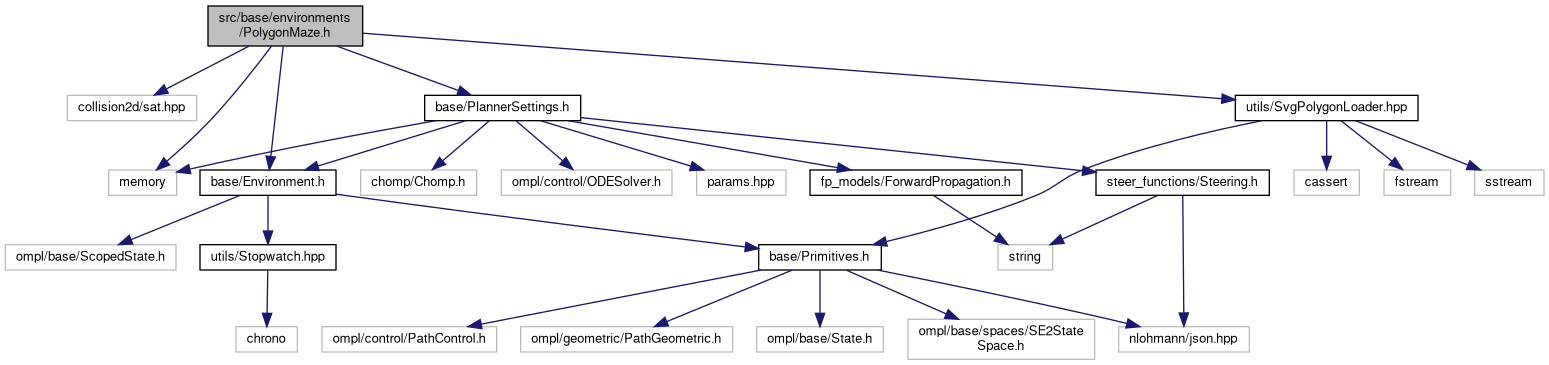
#include <collision2d/sat.hpp>#include <memory>#include "base/Environment.h"#include "base/PlannerSettings.h"#include "utils/SvgPolygonLoader.hpp"
Include dependency graph for PolygonMaze.h:
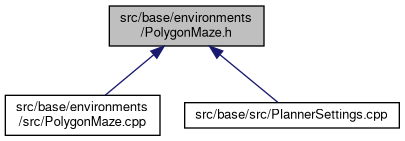
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PolygonMaze |
| Implements a maze consisting of convex shapes as obstacles. More... | |